Re-rendering Test Suite
The following scenes were rendered with the
PBRTv3 renderer. For each scene, we show multiple images: the control image (Control), the standard path tracer output (PT), the result of using integration with a fully weighted control variate (CVPT), the result of using our optimized weights (CVPT-opt), and the result using our optimized weights based on independently estimated statistics (CVPT-cross). For our optimized weights, we first filter the statistics using an NL-Means filter, and therefore provide results without this prefilter step (CVPT-opt-raw, CVPT-cross-raw). Lastly, we show results using the heuristic of Günther and Grosch [2015] to pick between the PT and CVPT estimates on a per pixel basis. That heuristic uses a threshold parameter and we show results for two settings of this parameter (including the setting recommended in the original publication, 0.1). For all results, we indicate underneath whether the estimate is biased or not.
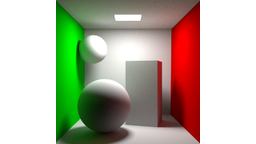
Luminance Test

Color Test
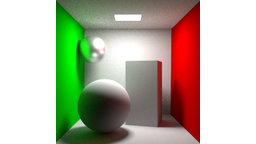
Roughness Test

Horse Room Test
Gradient-domain Reconstruction Test Suite
The following scenes were rendered using the
public implementation of the Gradient-domain Path Tracing method of Kettunen et al. [2015], which uses Wenzel Jakob's
Mitsuba renderer. We reconstruct the scenes with an array of techniques, some of which operate in the gradient domain (GDPT-L2, GDPT-L1, GDPT-L1L2, GDPT-WL2, CVPT-uni, CVPT-opt, CVPT-cross), and some of which don't (PT, RDFC, NFOR). Techniques with the prefix GDPT all use a screened Poisson solver, whereas techniques with the prefix CVPT use an iterated reconstruction using control variates. Since computing the gradients incurs a ~2.5x rendering time overhead, we increased the sampling rate by a factor of 2.5 for the PT, RDFC, and NFOR results. Please see our paper for a description of the CVPT-uni, CVPT-opt, CVPT-cross, and GDPT-WL2 reconstructions. The GDPT-L2 and GDPT-L1 reconstructions were proposed by Kettunen et al. [2015], the GDPT-L1L2 reconstruction by Manzi et al. [2016], the RDFC reconstruction by Rousselle et al. [2013], and the NFOR reconstruction by Bitterli et al. [2016]. The GDPT-L1L2 reconstruction is essentially a weighted screened Poisson solver where only the gradient constraints are reweighted, hence the name L1L2; in their original publication, Manzi et al. regularize the Poisson solver with constraints based on auxiliary buffers, but in our comparison we use a standard screened Poisson solver.

Sponza

Veach Door

Bathroom

Kitchen

Bookshelf
-
Kettunen, M., Manzi, M., Aittala, M., Lehtinen, J., Durand, F., and Zwicker, M. (2015). Gradient-domain path tracing. ACM Trans. Graph. 34, 4, Article 123 (July 2015)
-
Manzi, M., Vicini, D., and Zwicker, M. (2016). Regularizing Image Reconstruction for Gradient-Domain Rendering with Feature Patches. Computer Graphics Forum, 35: 263–273.
-
Rousselle, F., Manzi, M. and Zwicker, M. (2013), Robust Denoising using Feature and Color Information. Computer Graphics Forum, 32: 121–130.
-
Bitterli, B., Rousselle, F., Moon, B., Iglesias-Guitián, J. A., Adler, D., Mitchell, K., Jarosz, W. and Novák, J. (2016), Nonlinearly Weighted First-order Regression for Denoising Monte Carlo Renderings. Computer Graphics Forum, 35: 107–117.